Mean-Average-Precision (mAP)¶
Module Interface¶
- class torchmetrics.detection.mean_ap.MeanAveragePrecision(box_format='xyxy', iou_type='bbox', iou_thresholds=None, rec_thresholds=None, max_detection_thresholds=None, class_metrics=False, extended_summary=False, average='macro', backend='pycocotools', **kwargs)[source]¶
Compute the Mean-Average-Precision (mAP) and Mean-Average-Recall (mAR) for object detection predictions.
\[\text{mAP} = \frac{1}{n} \sum_{i=1}^{n} AP_i\]where \(AP_i\) is the average precision for class \(i\) and \(n\) is the number of classes. The average precision is defined as the area under the precision-recall curve. For object detection the recall and precision are defined based on the intersection of union (IoU) between the predicted bounding boxes and the ground truth bounding boxes e.g. if two boxes have an IoU > t (with t being some threshold) they are considered a match and therefore considered a true positive. The precision is then defined as the number of true positives divided by the number of all detected boxes and the recall is defined as the number of true positives divided by the number of all ground boxes.
As input to
forwardandupdatethe metric accepts the following input:preds(List): A list consisting of dictionaries each containing the key-values (each dictionary corresponds to a single image). Parameters that should be provided per dictboxes(Tensor): float tensor of shape(num_boxes, 4)containingnum_boxesdetection boxes of the format specified in the constructor. By default, this method expects(xmin, ymin, xmax, ymax)in absolute image coordinates, but can be changed using thebox_formatparameter. Only required when iou_type=”bbox”.scores(Tensor): float tensor of shape(num_boxes)containing detection scores for the boxes.labels(Tensor): integer tensor of shape(num_boxes)containing 0-indexed detection classes for the boxes.masks(Tensor): boolean tensor of shape(num_boxes, image_height, image_width)containing boolean masks. Only required when iou_type=”segm”.
target(List): A list consisting of dictionaries each containing the key-values (each dictionary corresponds to a single image). Parameters that should be provided per dict:boxes(Tensor): float tensor of shape(num_boxes, 4)containingnum_boxesground truth boxes of the format specified in the constructor. only required when iou_type=”bbox”. By default, this method expects(xmin, ymin, xmax, ymax)in absolute image coordinates.labels(Tensor): integer tensor of shape(num_boxes)containing 0-indexed ground truth classes for the boxes.masks(Tensor): boolean tensor of shape(num_boxes, image_height, image_width)containing boolean masks. Only required when iou_type=”segm”.iscrowd(Tensor): integer tensor of shape(num_boxes)containing 0/1 values indicating whether the bounding box/masks indicate a crowd of objects. Value is optional, and if not provided it will automatically be set to 0.area(Tensor): float tensor of shape(num_boxes)containing the area of the object. Value is optional, and if not provided will be automatically calculated based on the bounding box/masks provided. Only affects which samples contribute to the map_small, map_medium, map_large values
As output of
forwardandcomputethe metric returns the following output:map_dict: A dictionary containing the following key-values:map: (
Tensor), global mean average precision which by default is defined as mAP50-95 e.g. the mean average precision for IoU thresholds 0.50, 0.55, 0.60, …, 0.95 averaged over all classes and areas. If the IoU thresholds are changed this value will be calculated with the new thresholds.map_small: (
Tensor), mean average precision for small objects (area < 32^2 pixels)map_medium:(
Tensor), mean average precision for medium objects (32^2 pixels < area < 96^2 pixels)map_large: (
Tensor), mean average precision for large objects (area > 96^2 pixels)mar_{mdt[0]}: (
Tensor), mean average recall for max_detection_thresholds[0] (default 1) detection per imagemar_{mdt[1]}: (
Tensor), mean average recall for max_detection_thresholds[1] (default 10) detection per imagemar_{mdt[1]}: (
Tensor), mean average recall for max_detection_thresholds[2] (default 100) detection per imagemar_small: (
Tensor), mean average recall for small objects (area < 32^2 pixels)mar_medium: (
Tensor), mean average recall for medium objects (32^2 pixels < area < 96^2 pixels)mar_large: (
Tensor), mean average recall for large objects (area > 96^2 pixels)map_50: (
Tensor) (-1 if 0.5 not in the list of iou thresholds), mean average precision at IoU=0.50map_75: (
Tensor) (-1 if 0.75 not in the list of iou thresholds), mean average precision at IoU=0.75map_per_class: (
Tensor) (-1 if class metrics are disabled), mean average precision per observed classmar_{mdt[2]}_per_class: (
Tensor) (-1 if class metrics are disabled), mean average recall for max_detection_thresholds[2] (default 100) detections per image per observed classclasses (
Tensor), list of all observed classes
For an example on how to use this metric check the torchmetrics mAP example.
Attention
The
mapscore is calculated with @[ IoU=self.iou_thresholds | area=all | max_dets=max_detection_thresholds ] e.g. the mean average precision for IoU thresholds 0.50, 0.55, 0.60, …, 0.95 averaged over all classes and all areas and all max detections per image. If the IoU thresholds are changed this value will be calculated with the new thresholds. Caution: If the initialization parameters are changed, dictionary keys for mAR can change as well.Important
This metric supports, at the moment, two different backends for the evaluation. The default backend is
"pycocotools", which either require the official pycocotools implementation or this fork of pycocotools to be installed. We recommend using the fork as it is better maintained and easily available to install via pip: pip install pycocotools. It is also this fork that will be installed if you installtorchmetrics[detection]. The second backend is the faster-coco-eval implementation, which can be installed withpip install faster-coco-eval. This implementation is a maintained open-source implementation that is faster and corrects certain corner cases that the official implementation has. Our own testing has shown that the results are identical to the official implementation. Regardless of the backend we also require you to have torchvision version 0.8.0 or newer installed. Please install withpip install torchvision>=0.8orpip install torchmetrics[detection].- Parameters:
box_format¶ (
Literal['xyxy','xywh','cxcywh']) –Input format of given boxes. Supported formats are:
’xyxy’: boxes are represented via corners, x1, y1 being top left and x2, y2 being bottom right.
’xywh’ : boxes are represented via corner, width and height, x1, y2 being top left, w, h being width and height. This is the default format used by pycoco and all input formats will be converted to this.
’cxcywh’: boxes are represented via centre, width and height, cx, cy being center of box, w, h being width and height.
iou_type¶ (
Union[Literal['bbox','segm'],tuple[Literal['bbox','segm'],...]]) – Type of input (either masks or bounding-boxes) used for computing IOU. Supported IOU types are"bbox"or"segm"or both as a tuple.iou_thresholds¶ (
Optional[list[float]]) – IoU thresholds for evaluation. If set toNoneit corresponds to the stepped range[0.5,...,0.95]with step0.05. Else provide a list of floats.rec_thresholds¶ (
Optional[list[float]]) – Recall thresholds for evaluation. If set toNoneit corresponds to the stepped range[0,...,1]with step0.01. Else provide a list of floats.max_detection_thresholds¶ (
Optional[list[int]]) – Thresholds on max detections per image. If set to None will use thresholds[1, 10, 100]. Else, please provide a list of ints of length 3, which is the only supported length by both backends.class_metrics¶ (
bool) – Option to enable per-class metrics for mAP and mAR_100. Has a performance impact that scales linearly with the number of classes in the dataset.Option to enable extended summary with additional metrics including IOU, precision and recall. The output dictionary will contain the following extra key-values:
ious: a dictionary containing the IoU values for every image/class combination e.g.ious[(0,0)]would contain the IoU for image 0 and class 0. Each value is a tensor with shape(n,m)wherenis the number of detections andmis the number of ground truth boxes for that image/class combination.precision: a tensor of shape(TxRxKxAxM)containing the precision values. HereTis the number of IoU thresholds,Ris the number of recall thresholds,Kis the number of classes,Ais the number of areas andMis the number of max detections per image.recall: a tensor of shape(TxKxAxM)containing the recall values. HereTis the number of IoU thresholds,Kis the number of classes,Ais the number of areas andMis the number of max detections per image.scores: a tensor of shape(TxRxKxAxM)containing the confidence scores. HereTis the number of IoU thresholds,Ris the number of recall thresholds,Kis the number of classes,Ais the number of areas andMis the number of max detections per image.
average¶ (
Literal['macro','micro']) – Method for averaging scores over labels. Choose between “``”macro”`` and"micro".backend¶ (
Literal['pycocotools','faster_coco_eval']) – Backend to use for the evaluation. Choose between"pycocotools"and"faster_coco_eval".kwargs¶ (
Any) – Additional keyword arguments, see Advanced metric settings for more info.
- Raises:
ModuleNotFoundError – If
pycocotoolsis not installedModuleNotFoundError – If
torchvisionis not installed or version installed is lower than 0.8.0ValueError – If
box_formatis not one of"xyxy","xywh"or"cxcywh"ValueError – If
iou_typeis not one of"bbox"or"segm"ValueError – If
iou_thresholdsis not None or a list of floatsValueError – If
rec_thresholdsis not None or a list of floatsValueError – If
max_detection_thresholdsis not None or a list of intsValueError – If
class_metricsis not a boolean
Example:
Basic example for when `iou_type="bbox"`. In this case the ``boxes`` key is required in the input dictionaries, in addition to the ``scores`` and ``labels`` keys. >>> from torch import tensor >>> from torchmetrics.detection import MeanAveragePrecision >>> preds = [ ... dict( ... boxes=tensor([[258.0, 41.0, 606.0, 285.0]]), ... scores=tensor([0.536]), ... labels=tensor([0]), ... ) ... ] >>> target = [ ... dict( ... boxes=tensor([[214.0, 41.0, 562.0, 285.0]]), ... labels=tensor([0]), ... ) ... ] >>> metric = MeanAveragePrecision(iou_type="bbox") >>> metric.update(preds, target) >>> from pprint import pprint >>> pprint(metric.compute()) {'classes': tensor(0, dtype=torch.int32), 'map': tensor(0.6000), 'map_50': tensor(1.), 'map_75': tensor(1.), 'map_large': tensor(0.6000), 'map_medium': tensor(-1.), 'map_per_class': tensor(-1.), 'map_small': tensor(-1.), 'mar_1': tensor(0.6000), 'mar_10': tensor(0.6000), 'mar_100': tensor(0.6000), 'mar_100_per_class': tensor(-1.), 'mar_large': tensor(0.6000), 'mar_medium': tensor(-1.), 'mar_small': tensor(-1.)}Example:
Basic example for when `iou_type="segm"`. In this case the ``masks`` key is required in the input dictionaries, in addition to the ``scores`` and ``labels`` keys. >>> from torch import tensor >>> from torchmetrics.detection import MeanAveragePrecision >>> mask_pred = [ ... [0, 0, 0, 0, 0], ... [0, 0, 1, 1, 0], ... [0, 0, 1, 1, 0], ... [0, 0, 0, 0, 0], ... [0, 0, 0, 0, 0], ... ] >>> mask_tgt = [ ... [0, 0, 0, 0, 0], ... [0, 0, 1, 0, 0], ... [0, 0, 1, 1, 0], ... [0, 0, 1, 0, 0], ... [0, 0, 0, 0, 0], ... ] >>> preds = [ ... dict( ... masks=tensor([mask_pred], dtype=torch.bool), ... scores=tensor([0.536]), ... labels=tensor([0]), ... ) ... ] >>> target = [ ... dict( ... masks=tensor([mask_tgt], dtype=torch.bool), ... labels=tensor([0]), ... ) ... ] >>> metric = MeanAveragePrecision(iou_type="segm") >>> metric.update(preds, target) >>> from pprint import pprint >>> pprint(metric.compute()) {'classes': tensor(0, dtype=torch.int32), 'map': tensor(0.2000), 'map_50': tensor(1.), 'map_75': tensor(0.), 'map_large': tensor(-1.), 'map_medium': tensor(-1.), 'map_per_class': tensor(-1.), 'map_small': tensor(0.2000), 'mar_1': tensor(0.2000), 'mar_10': tensor(0.2000), 'mar_100': tensor(0.2000), 'mar_100_per_class': tensor(-1.), 'mar_large': tensor(-1.), 'mar_medium': tensor(-1.), 'mar_small': tensor(0.2000)}- coco_to_tm(coco_preds, coco_target, iou_type=('bbox',), backend='pycocotools')[source]¶
Utility function for converting .json coco format files to the input format of this metric.
The function accepts a file for the predictions and a file for the target in coco format and converts them to a list of dictionaries containing the boxes, labels and scores in the input format of this metric.
- Parameters:
coco_preds¶ (
str) – Path to the json file containing the predictions in coco formatcoco_target¶ (
str) – Path to the json file containing the targets in coco formatiou_type¶ (
Union[Literal['bbox','segm'],tuple[Literal['bbox','segm'],...]]) – Type of input, either bbox for bounding boxes or segm for segmentation masksbackend¶ (
Literal['pycocotools','faster_coco_eval']) – Backend to use for the conversion. Either pycocotools or faster_coco_eval.
- Return type:
- Returns:
A tuple containing the predictions and targets in the input format of this metric. Each element of the tuple is a list of dictionaries containing the boxes, labels and scores.
Example
>>> # File formats are defined at https://cocodataset.org/#format-data >>> # Example files can be found at >>> # https://github.com/cocodataset/cocoapi/tree/master/results >>> from torchmetrics.detection import MeanAveragePrecision >>> preds, target = MeanAveragePrecision().coco_to_tm( ... "instances_val2014_fakebbox100_results.json", ... "val2014_fake_eval_res.txt.json" ... iou_type="bbox" ... )
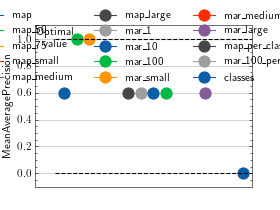
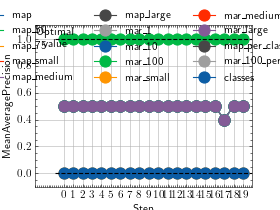
- plot(val=None, ax=None)[source]¶
Plot a single or multiple values from the metric.
- Parameters:
val¶ (
Union[dict[str,Tensor],Sequence[dict[str,Tensor]],None]) – Either a single result from calling metric.forward or metric.compute or a list of these results. If no value is provided, will automatically call metric.compute and plot that result.ax¶ (
Optional[Axes]) – An matplotlib axis object. If provided will add plot to that axis
- Return type:
- Returns:
Figure object and Axes object
- Raises:
ModuleNotFoundError – If matplotlib is not installed
>>> from torch import tensor >>> from torchmetrics.detection.mean_ap import MeanAveragePrecision >>> preds = [dict( ... boxes=tensor([[258.0, 41.0, 606.0, 285.0]]), ... scores=tensor([0.536]), ... labels=tensor([0]), ... )] >>> target = [dict( ... boxes=tensor([[214.0, 41.0, 562.0, 285.0]]), ... labels=tensor([0]), ... )] >>> metric = MeanAveragePrecision() >>> metric.update(preds, target) >>> fig_, ax_ = metric.plot()
>>> # Example plotting multiple values >>> import torch >>> from torchmetrics.detection.mean_ap import MeanAveragePrecision >>> preds = lambda: [dict( ... boxes=torch.tensor([[258.0, 41.0, 606.0, 285.0]]) + torch.randint(10, (1,4)), ... scores=torch.tensor([0.536]) + 0.1*torch.rand(1), ... labels=torch.tensor([0]), ... )] >>> target = [dict( ... boxes=torch.tensor([[214.0, 41.0, 562.0, 285.0]]), ... labels=torch.tensor([0]), ... )] >>> metric = MeanAveragePrecision() >>> vals = [] >>> for _ in range(20): ... vals.append(metric(preds(), target)) >>> fig_, ax_ = metric.plot(vals)
- tm_to_coco(name='tm_map_input')[source]¶
Utility function for converting the input for this metric to coco format and saving it to a json file.
This function should be used after calling .update(…) or .forward(…) on all data that should be written to the file, as the input is then internally cached. The function then converts to information to coco format a writes it to json files.
- Parameters:
name¶ (
str) – Name of the output file, which will be appended with “_preds.json” and “_target.json”- Return type:
Example
>>> from torch import tensor >>> from torchmetrics.detection import MeanAveragePrecision >>> preds = [ ... dict( ... boxes=tensor([[258.0, 41.0, 606.0, 285.0]]), ... scores=tensor([0.536]), ... labels=tensor([0]), ... ) ... ] >>> target = [ ... dict( ... boxes=tensor([[214.0, 41.0, 562.0, 285.0]]), ... labels=tensor([0]), ... ) ... ] >>> metric = MeanAveragePrecision(iou_type="bbox") >>> metric.update(preds, target) >>> metric.tm_to_coco("tm_map_input")
Functional Interface¶
- torchmetrics.functional.detection.mean_average_precision(preds, target, box_format='xyxy', iou_type='bbox', iou_thresholds=None, rec_thresholds=None, max_detection_thresholds=None, class_metrics=False, extended_summary=False, average='macro', backend='pycocotools', warn_on_many_detections=True)[source]¶
Compute the mean average precision (mAP) and mean average recall (mAR) for object detection predictions.
This function evaluates detection predictions for either bounding boxes or segmentation masks based on the provided
iou_type, comparing predictions (preds) and ground truth annotations (target) using a COCO-style evaluation. The expected input for each image is a dictionary with keys:For bounding boxes (
iou_type="bbox"):boxes,scores, andlabels.For segmentation (
iou_type="segm"):masks,scores, andlabels.
In addition, ground truth dictionaries may include the optional keys
iscrowdandarea. Boxes are expected in the coordinate format provided viabox_format, which supports:"xyxy": [xmin, ymin, xmax, ymax]"xywh": [xmin, ymin, width, height]"cxcywh": [center_x, center_y, width, height]
The evaluation defaults to IoU thresholds from 0.50 to 0.95 (step 0.05), recall thresholds from 0.00 to 1.00 (step 0.01), and maximum detection thresholds of [1, 10, 100]. These can be overridden by specifying
iou_thresholds,rec_thresholds, andmax_detection_thresholds, respectively. Optionally, per-class metrics may be computed by enablingclass_metrics, and an extended summary (including IoU, precision, recall, and scores) is available viaextended_summary. The averaging method over labels can be set withaverage(“macro” or “micro”) and the evaluation is performed using either thepycocotoolsorfaster_coco_evalbackend.- Parameters:
preds¶ (
List[Dict[str,Any]]) – List of dictionaries, each representing detection predictions for a single image.target¶ (
List[Dict[str,Any]]) – List of dictionaries, each representing ground truth annotations for a single image.box_format¶ (
Literal['xyxy','xywh','cxcywh']) – Format of the input bounding boxes. Supported values are “xyxy”, “xywh”, and “cxcywh”.iou_type¶ (
Union[Literal['bbox','segm'],Tuple[Literal['bbox','segm'],...]]) – Type of IoU to compute. Can be “bbox”, “segm”, or a tuple containing both.iou_thresholds¶ (
Optional[list[float]]) – List of IoU thresholds (default is [0.5, 0.55, …, 0.95]).rec_thresholds¶ (
Optional[list[float]]) – List of recall thresholds (default is [0.0, 0.01, …, 1.0]).max_detection_thresholds¶ (
Optional[list[int]]) – List of maximum detections per image (default is [1, 10, 100]).class_metrics¶ (
bool) – Whether to compute per-class mAP and mAR metrics.extended_summary¶ (
bool) – Whether to include additional outputs (IoU, precision, recall, scores) in the result.average¶ (
Literal['macro','micro']) – Averaging method over labels, either “macro” or “micro”.backend¶ (
Literal['pycocotools','faster_coco_eval']) – Backend to use for evaluation (“pycocotools” or “faster_coco_eval”).warn_on_many_detections¶ (
bool) – If True, warn when there are an unusually large number of detections.
- Returns:
- A dictionary containing the evaluation metrics. The dictionary includes the following keys:
map: Global mean average precision over the defined IoU thresholds.mar_{max_det}: Global mean average recall for each maximum detection threshold.map_per_class: Mean average precision per observed class (or -1 ifclass_metricsis disabled).mar_{max_det}_per_class: Mean average recall per observed class for the highest detection threshold.classes: A tensor listing all observed classes.
- Return type:
Example:
# Example with bounding boxes >>> from torch import tensor >>> from torchmetrics.functional.detection.map import mean_average_precision >>> preds = [ ... { ... "boxes": tensor([[258.0, 41.0, 606.0, 285.0]]), ... "scores": tensor([0.536]), ... "labels": tensor([0]), ... } ... ] >>> target = [ ... { ... "boxes": tensor([[214.0, 41.0, 562.0, 285.0]]), ... "labels": tensor([0]), ... } ... ] >>> result = mean_average_precision(preds, target, iou_type="bbox") >>> print(f"mAP: {result['map']:.4f}, [email protected]: {result['map_50']:.4f}") mAP: 0.6000, mAP@0.5: 1.0000
Example:
# Example with segmentation masks >>> import torch >>> from torch import tensor >>> from torchmetrics.functional.detection.map import mean_average_precision >>> mask_pred = tensor([ ... [0, 0, 0, 0, 0], ... [0, 0, 1, 1, 0], ... [0, 0, 1, 1, 0], ... [0, 0, 0, 0, 0], ... [0, 0, 0, 0, 0], ... ], dtype=torch.bool) >>> mask_tgt = tensor([ ... [0, 0, 0, 0, 0], ... [0, 0, 1, 0, 0], ... [0, 0, 1, 1, 0], ... [0, 0, 1, 0, 0], ... [0, 0, 0, 0, 0], ... ], dtype=torch.bool) >>> preds = [ ... { ... "masks": mask_pred.unsqueeze(0), ... "scores": tensor([0.536]), ... "labels": tensor([0]), ... } ... ] >>> target = [ ... { ... "masks": mask_tgt.unsqueeze(0), ... "labels": tensor([0]), ... } ... ] >>> result = mean_average_precision(preds, target, iou_type="segm") >>> print(f"mAP: {result['map']:.4f}, [email protected]: {result['map_50']:.4f}") mAP: 0.2000, mAP@0.5: 1.0000
