How to train a Deep Q Network¶
Author: PL team
License: CC BY-SA
Generated: 2022-04-28T08:05:34.347059
Main takeaways:
RL has the same flow as previous models we have seen, with a few additions
Handle unsupervised learning by using an IterableDataset where the dataset itself is constantly updated during training
Each training step carries has the agent taking an action in the environment and storing the experience in the IterableDataset
Open in 
Give us a ⭐ on Github | Check out the documentation | Join us on Slack
Setup¶
This notebook requires some packages besides pytorch-lightning.
[1]:
! pip install --quiet "ipython[notebook]" "seaborn" "torchmetrics>=0.6" "pygame" "gym" "pandas" "pytorch-lightning>=1.4" "torch>=1.6, <1.9"
WARNING: You are using pip version 21.3.1; however, version 22.0.4 is available.
You should consider upgrading via the '/usr/bin/python3.8 -m pip install --upgrade pip' command.
[2]:
import os
from collections import OrderedDict, deque, namedtuple
from typing import Iterator, List, Tuple
import gym
import numpy as np
import pandas as pd
import seaborn as sn
import torch
from IPython.core.display import display
from pytorch_lightning import LightningModule, Trainer
from pytorch_lightning.loggers import CSVLogger
from torch import Tensor, nn
from torch.optim import Adam, Optimizer
from torch.utils.data import DataLoader
from torch.utils.data.dataset import IterableDataset
PATH_DATASETS = os.environ.get("PATH_DATASETS", ".")
[3]:
class DQN(nn.Module):
"""Simple MLP network."""
def __init__(self, obs_size: int, n_actions: int, hidden_size: int = 128):
"""
Args:
obs_size: observation/state size of the environment
n_actions: number of discrete actions available in the environment
hidden_size: size of hidden layers
"""
super().__init__()
self.net = nn.Sequential(
nn.Linear(obs_size, hidden_size),
nn.ReLU(),
nn.Linear(hidden_size, n_actions),
)
def forward(self, x):
return self.net(x.float())
Memory¶
[4]:
# Named tuple for storing experience steps gathered in training
Experience = namedtuple(
"Experience",
field_names=["state", "action", "reward", "done", "new_state"],
)
[5]:
class ReplayBuffer:
"""Replay Buffer for storing past experiences allowing the agent to learn from them.
Args:
capacity: size of the buffer
"""
def __init__(self, capacity: int) -> None:
self.buffer = deque(maxlen=capacity)
def __len__(self) -> None:
return len(self.buffer)
def append(self, experience: Experience) -> None:
"""Add experience to the buffer.
Args:
experience: tuple (state, action, reward, done, new_state)
"""
self.buffer.append(experience)
def sample(self, batch_size: int) -> Tuple:
indices = np.random.choice(len(self.buffer), batch_size, replace=False)
states, actions, rewards, dones, next_states = zip(*(self.buffer[idx] for idx in indices))
return (
np.array(states),
np.array(actions),
np.array(rewards, dtype=np.float32),
np.array(dones, dtype=bool),
np.array(next_states),
)
[6]:
class RLDataset(IterableDataset):
"""Iterable Dataset containing the ExperienceBuffer which will be updated with new experiences during training.
Args:
buffer: replay buffer
sample_size: number of experiences to sample at a time
"""
def __init__(self, buffer: ReplayBuffer, sample_size: int = 200) -> None:
self.buffer = buffer
self.sample_size = sample_size
def __iter__(self) -> Iterator[Tuple]:
states, actions, rewards, dones, new_states = self.buffer.sample(self.sample_size)
for i in range(len(dones)):
yield states[i], actions[i], rewards[i], dones[i], new_states[i]
Agent¶
[7]:
class Agent:
"""Base Agent class handeling the interaction with the environment."""
def __init__(self, env: gym.Env, replay_buffer: ReplayBuffer) -> None:
"""
Args:
env: training environment
replay_buffer: replay buffer storing experiences
"""
self.env = env
self.replay_buffer = replay_buffer
self.reset()
self.state = self.env.reset()
def reset(self) -> None:
"""Resents the environment and updates the state."""
self.state = self.env.reset()
def get_action(self, net: nn.Module, epsilon: float, device: str) -> int:
"""Using the given network, decide what action to carry out using an epsilon-greedy policy.
Args:
net: DQN network
epsilon: value to determine likelihood of taking a random action
device: current device
Returns:
action
"""
if np.random.random() < epsilon:
action = self.env.action_space.sample()
else:
state = torch.tensor([self.state])
if device not in ["cpu"]:
state = state.cuda(device)
q_values = net(state)
_, action = torch.max(q_values, dim=1)
action = int(action.item())
return action
@torch.no_grad()
def play_step(
self,
net: nn.Module,
epsilon: float = 0.0,
device: str = "cpu",
) -> Tuple[float, bool]:
"""Carries out a single interaction step between the agent and the environment.
Args:
net: DQN network
epsilon: value to determine likelihood of taking a random action
device: current device
Returns:
reward, done
"""
action = self.get_action(net, epsilon, device)
# do step in the environment
new_state, reward, done, _ = self.env.step(action)
exp = Experience(self.state, action, reward, done, new_state)
self.replay_buffer.append(exp)
self.state = new_state
if done:
self.reset()
return reward, done
DQN Lightning Module¶
[8]:
class DQNLightning(LightningModule):
"""Basic DQN Model."""
def __init__(
self,
batch_size: int = 16,
lr: float = 1e-2,
env: str = "CartPole-v0",
gamma: float = 0.99,
sync_rate: int = 10,
replay_size: int = 1000,
warm_start_size: int = 1000,
eps_last_frame: int = 1000,
eps_start: float = 1.0,
eps_end: float = 0.01,
episode_length: int = 200,
warm_start_steps: int = 1000,
) -> None:
"""
Args:
batch_size: size of the batches")
lr: learning rate
env: gym environment tag
gamma: discount factor
sync_rate: how many frames do we update the target network
replay_size: capacity of the replay buffer
warm_start_size: how many samples do we use to fill our buffer at the start of training
eps_last_frame: what frame should epsilon stop decaying
eps_start: starting value of epsilon
eps_end: final value of epsilon
episode_length: max length of an episode
warm_start_steps: max episode reward in the environment
"""
super().__init__()
self.save_hyperparameters()
self.env = gym.make(self.hparams.env)
obs_size = self.env.observation_space.shape[0]
n_actions = self.env.action_space.n
self.net = DQN(obs_size, n_actions)
self.target_net = DQN(obs_size, n_actions)
self.buffer = ReplayBuffer(self.hparams.replay_size)
self.agent = Agent(self.env, self.buffer)
self.total_reward = 0
self.episode_reward = 0
self.populate(self.hparams.warm_start_steps)
def populate(self, steps: int = 1000) -> None:
"""Carries out several random steps through the environment to initially fill up the replay buffer with
experiences.
Args:
steps: number of random steps to populate the buffer with
"""
for _ in range(steps):
self.agent.play_step(self.net, epsilon=1.0)
def forward(self, x: Tensor) -> Tensor:
"""Passes in a state x through the network and gets the q_values of each action as an output.
Args:
x: environment state
Returns:
q values
"""
output = self.net(x)
return output
def dqn_mse_loss(self, batch: Tuple[Tensor, Tensor]) -> Tensor:
"""Calculates the mse loss using a mini batch from the replay buffer.
Args:
batch: current mini batch of replay data
Returns:
loss
"""
states, actions, rewards, dones, next_states = batch
state_action_values = self.net(states).gather(1, actions.long().unsqueeze(-1)).squeeze(-1)
with torch.no_grad():
next_state_values = self.target_net(next_states).max(1)[0]
next_state_values[dones] = 0.0
next_state_values = next_state_values.detach()
expected_state_action_values = next_state_values * self.hparams.gamma + rewards
return nn.MSELoss()(state_action_values, expected_state_action_values)
def get_epsilon(self, start: int, end: int, frames: int) -> float:
if self.global_step > frames:
return end
return start - (self.global_step / frames) * (start - end)
def training_step(self, batch: Tuple[Tensor, Tensor], nb_batch) -> OrderedDict:
"""Carries out a single step through the environment to update the replay buffer. Then calculates loss
based on the minibatch recieved.
Args:
batch: current mini batch of replay data
nb_batch: batch number
Returns:
Training loss and log metrics
"""
device = self.get_device(batch)
epsilon = self.get_epsilon(self.hparams.eps_start, self.hparams.eps_end, self.hparams.eps_last_frame)
self.log("epsilon", epsilon)
# step through environment with agent
reward, done = self.agent.play_step(self.net, epsilon, device)
self.episode_reward += reward
self.log("episode reward", self.episode_reward)
# calculates training loss
loss = self.dqn_mse_loss(batch)
if done:
self.total_reward = self.episode_reward
self.episode_reward = 0
# Soft update of target network
if self.global_step % self.hparams.sync_rate == 0:
self.target_net.load_state_dict(self.net.state_dict())
self.log_dict(
{
"reward": reward,
"train_loss": loss,
}
)
self.log("total_reward", self.total_reward, prog_bar=True)
self.log("steps", self.global_step, logger=False, prog_bar=True)
return loss
def configure_optimizers(self) -> List[Optimizer]:
"""Initialize Adam optimizer."""
optimizer = Adam(self.net.parameters(), lr=self.hparams.lr)
return optimizer
def __dataloader(self) -> DataLoader:
"""Initialize the Replay Buffer dataset used for retrieving experiences."""
dataset = RLDataset(self.buffer, self.hparams.episode_length)
dataloader = DataLoader(
dataset=dataset,
batch_size=self.hparams.batch_size,
)
return dataloader
def train_dataloader(self) -> DataLoader:
"""Get train loader."""
return self.__dataloader()
def get_device(self, batch) -> str:
"""Retrieve device currently being used by minibatch."""
return batch[0].device.index if self.on_gpu else "cpu"
Trainer¶
[9]:
model = DQNLightning()
trainer = Trainer(
accelerator="auto",
devices=1 if torch.cuda.is_available() else None, # limiting got iPython runs
max_epochs=150,
val_check_interval=50,
logger=CSVLogger(save_dir="logs/"),
)
trainer.fit(model)
GPU available: True, used: True
TPU available: False, using: 0 TPU cores
IPU available: False, using: 0 IPUs
HPU available: False, using: 0 HPUs
LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [0,1]
| Name | Type | Params
------------------------------------
0 | net | DQN | 898
1 | target_net | DQN | 898
------------------------------------
1.8 K Trainable params
0 Non-trainable params
1.8 K Total params
0.007 Total estimated model params size (MB)
/home/AzDevOps_azpcontainer/.local/lib/python3.8/site-packages/pytorch_lightning/trainer/connectors/data_connector.py:240: PossibleUserWarning: The dataloader, train_dataloader, does not have many workers which may be a bottleneck. Consider increasing the value of the `num_workers` argument` (try 12 which is the number of cpus on this machine) in the `DataLoader` init to improve performance.
rank_zero_warn(
/home/AzDevOps_azpcontainer/.local/lib/python3.8/site-packages/pytorch_lightning/trainer/connectors/logger_connector/result.py:229: UserWarning: You called `self.log('total_reward', ...)` in your `training_step` but the value needs to be floating point. Converting it to torch.float32.
warning_cache.warn(
/home/AzDevOps_azpcontainer/.local/lib/python3.8/site-packages/pytorch_lightning/trainer/connectors/logger_connector/result.py:229: UserWarning: You called `self.log('steps', ...)` in your `training_step` but the value needs to be floating point. Converting it to torch.float32.
warning_cache.warn(
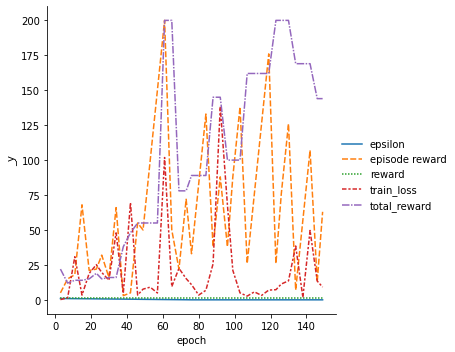
[10]:
metrics = pd.read_csv(f"{trainer.logger.log_dir}/metrics.csv")
del metrics["step"]
metrics.set_index("epoch", inplace=True)
display(metrics.dropna(axis=1, how="all").head())
sn.relplot(data=metrics, kind="line")
| epsilon | episode reward | reward | train_loss | total_reward | |
|---|---|---|---|---|---|
| epoch | |||||
| 3 | 0.95149 | 5.0 | 1.0 | 0.189056 | 22.0 |
| 7 | 0.90199 | 15.0 | 1.0 | 1.432721 | 12.0 |
| 11 | 0.85249 | 18.0 | 1.0 | 30.838800 | 14.0 |
| 15 | 0.80299 | 68.0 | 1.0 | 3.394485 | 14.0 |
| 19 | 0.75349 | 21.0 | 1.0 | 18.886366 | 15.0 |
[10]:
<seaborn.axisgrid.FacetGrid at 0x7f02190640d0>
Congratulations - Time to Join the Community!¶
Congratulations on completing this notebook tutorial! If you enjoyed this and would like to join the Lightning movement, you can do so in the following ways!
Star Lightning on GitHub¶
The easiest way to help our community is just by starring the GitHub repos! This helps raise awareness of the cool tools we’re building.
Join our Slack!¶
The best way to keep up to date on the latest advancements is to join our community! Make sure to introduce yourself and share your interests in #general channel
Contributions !¶
The best way to contribute to our community is to become a code contributor! At any time you can go to Lightning or Bolt GitHub Issues page and filter for “good first issue”.
You can also contribute your own notebooks with useful examples !
Great thanks from the entire Pytorch Lightning Team for your interest !¶

